C++ interface¶
Take a look at examples/cpp/polylidar-full-example.cpp.
First we load a numpy file of an organized point cloud that has been previosly captured.
std::vector<unsigned long> shape;
bool fortran_order;
std::vector<double> data;
std::cout << "Loading previously captured Organized Point Cloud from an L515 Camera." << std::endl;
try
{
std::cout << "Attempting to load OPC file from ./fixtures/realsense/opc_example_one/L515_OPC.npy" << std::endl;
npy::LoadArrayFromNumpy("./fixtures/realsense/opc_example_one/L515_OPC.npy", shape, fortran_order, data);
}
catch (const std::exception& e)
{
try
{
std::cout << "Last chance. Trying to load OPC file from ../fixtures/realsense/opc_example_one/L515_OPC.npy"
<< std::endl;
npy::LoadArrayFromNumpy("../fixtures/realsense/opc_example_one/L515_OPC.npy", shape, fortran_order, data);
}
catch (const std::exception& e)
{
std::cout << "Can't find L515_OPC.npy file. Exiting..." << std::endl;
std::exit(1);
}
}
Then we convert the vector to a matrix wrapper (no copy) that Polylidar uses.
// Create Matrix Wrapper around Point Cloud Data (no copy)
std::cout << "Shape of Point Cloud is: " << shape << std::endl;
auto num_points = shape[0] * shape[1];
auto cols = shape[2]; // 3
// Expected to be a num_points X 3 array but **organized* in memory
Polylidar::Matrix<double> opc(data.data(), num_points, cols);
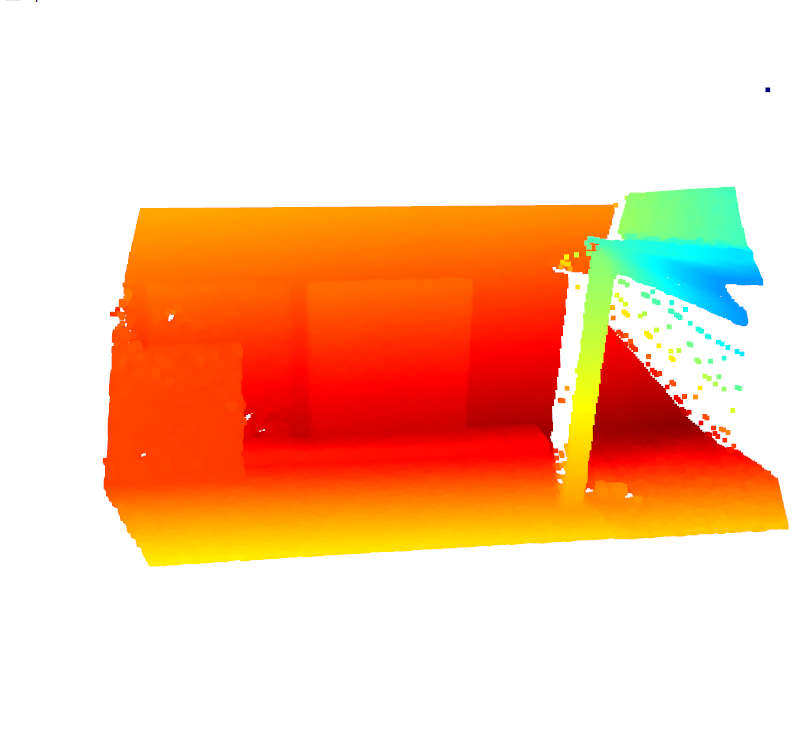
Then we visualize the point cloud:
// Visualize Point Cloud
std::cout << "Visualizing Point Cloud. Rotate View. Close Open3D window when satisfied..." << std::endl;
auto pcd_eigen = VisUtility::MapEigen<Eigen::Vector3d>(opc);
std::shared_ptr<open3d::geometry::PointCloud> pointcloud_ptr(new open3d::geometry::PointCloud(pcd_eigen));
open3d::visualization::DrawGeometries({pointcloud_ptr});
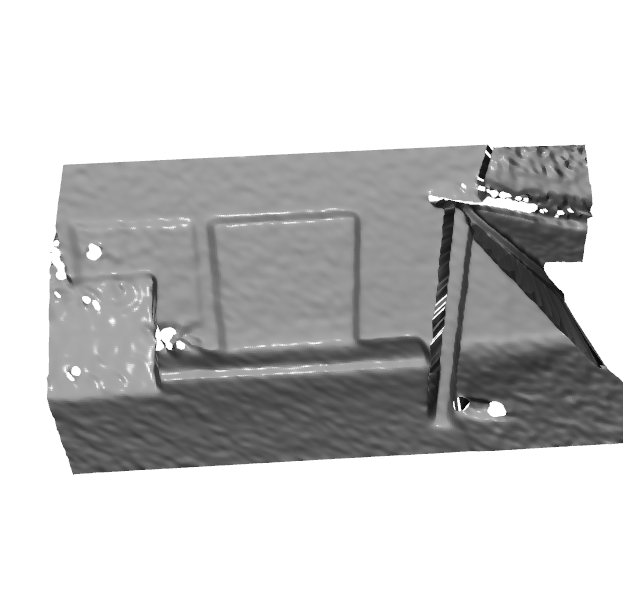
Then we create and visualize the mesh:
// Create Mesh From Point Cloud
std::cout << "Creating Mesh and smoothing. NOT using optimized filters, see OrganizedPointFilters" << std::endl;
Polylidar::MeshHelper::HalfEdgeTriangulation tri_mesh;
Polylidar::VUI valid_idx;
std::tie(tri_mesh, valid_idx) =
Polylidar::MeshHelper::ExtractTriMeshFromOrganizedPointCloud(opc, shape[0], shape[1], 1, true);
Polylidar::MeshHelper::LaplacianFilterVertices(tri_mesh, 3, 1.0);
tri_mesh.ComputeTriangleNormals();
Polylidar::MeshHelper::BilateralFilterNormals(tri_mesh, 5, 0.2, 0.25);
// Visualize Mesh
std::cout << "Visualizing mesh. Rotate View." << std::endl;
auto o3d_mesh = VisUtility::CreateOpen3DMesh(tri_mesh);
open3d::visualization::DrawGeometries({o3d_mesh});
Then we find the dominant plane normals using FastGA:
// Find Dominant Plane Normals
FastGA::GaussianAccumulatorS2Beta fastgac(4);
auto downsampled_normals = DownSampleNormals(tri_mesh.triangle_normals);
fastgac.Integrate(downsampled_normals);
FastGA::MatX3d peaks = fastgac.FindPeaks(50, false, 0.10, 0.15);
std::cout << "Detected Peaks with FastGaussianAccumulator. Here are the detected peaks: " << peaks << std::endl;
Then we extract the Planes and Polygons:
// Extracting Planes and Polygons
std::cout << "Extracting Polygons from all detected peaks: " << std::endl;
Polylidar::Matrix<double> peaks_mat = ConvertMatX3dtoMatrix(peaks);
Polylidar::Polylidar3D pl(0.0, 0.05, 500, 10, 0.15, 0.95, 0.95);
Polylidar::PlanesGroup planes_group;
Polylidar::PolygonsGroup polygons_group;
std::tie(planes_group, polygons_group) = pl.ExtractPlanesAndPolygons(tri_mesh, peaks_mat);
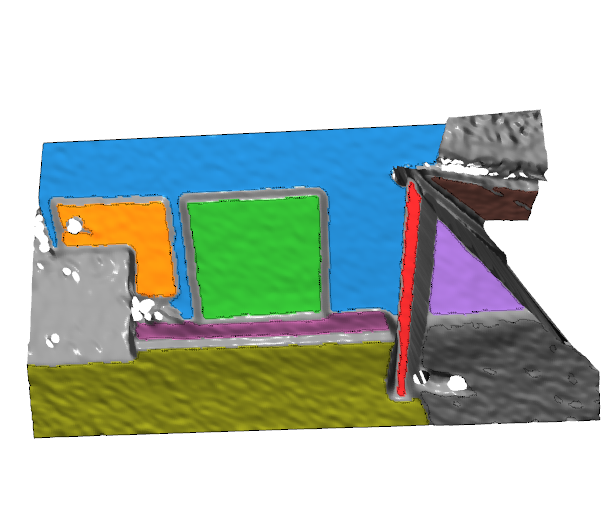
Then we colorize the Open3D mesh by plane segments and create the corresponding polygons:
// Paint Planes for visualization
for (auto& plane_group : planes_group)
{
for (auto& plane_segment : plane_group)
{
auto color = VisUtility::NextColor();
VisUtility::PaintPlane(o3d_mesh, plane_segment, color);
}
}
// Create Open3D Polygons (LineSets (no thickness))
std::vector<std::shared_ptr<const open3d::geometry::Geometry>> to_draw;
for (auto& polygon_group : polygons_group)
{
for (auto& polygon : polygon_group)
{
auto ls = VisUtility::CreateLineSetFromPolygon(polygon, tri_mesh.vertices);
to_draw.push_back(ls);
}
}
std::cout << "Visualing Planes and Polygon. Each plane segment is color coded. Polgyons are shown as thin lines "
"(OpenGL has no thickness): "
<< std::endl;
to_draw.push_back(o3d_mesh);
open3d::visualization::DrawGeometries(to_draw);
Full output:
$ ./cmake-build/bin/Release/polylidar-full.exe
A more complete example of using Polylidar3D with 3D Data. Needs Open3D and FastGA.
Loading previously captured Organized Point Cloud from an L515 Camera.
Attempting to load OPC file from ./fixtures/realsense/opc_example_one/L515_OPC.npy
Shape of Point Cloud is: [180, 320, 3]
Visualizing Point Cloud. Rotate View. Close Open3D window when satisfied...
Creating Mesh and smoothing. NOT using optimized filters, see OrganizedPointFilters
Visualizing mesh. Rotate View.
Detected Peaks with FastGaussianAccumulator. Here are the detected peaks: [0.0641286, 0.525564, -0.848333], [0.00935028, -0.849775, -0.527063],
Extracting Polygons from all detected peaks:
Visualing Planes and Polygon. Each plane segment is color coded. Polgyons are shown as thin lines (OpenGL has no thickness):