Introducing Polylidar3D¶
Polylidar3D
Polygon Extraction from 2D Point Sets, Unorganized/Organized 3D Point Clouds, and Triangular Meshes
Key Features • Documentation • Use Cases • Credits • Related • Citations • License
![]()
Key Features¶
Fast (Multi)Polygon Extraction from multiple sources of 2D and 3D Data
Written in C++ for portability
Extremely fast single-threaded but includes CPU multi-threading using data and task-based parallelism
Polygons with holes may be returned
Python3 bindings using PyBind11
Low overhead for calling python/cpp interface (no copying of point cloud data)
Python and C++ Examples
Examples from 2D point sets, unorganized 3D point clouds, organized 3D point clouds (i.e., range images), and user provided meshes
Cross platform
Windows and Linux ready
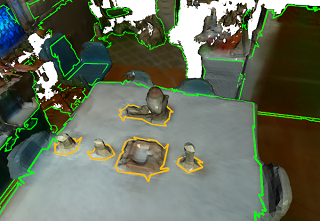
Polylidar3D is a non-convex polygon extraction algorithm which takes as input either unorganized 2D point sets, unorganized 3D point clouds (e.g., airborne LiDAR point clouds), organized 3D point clouds (e.g., range images), or user provided meshes. In 3D, the non-convex polygons extracted represent flat surfaces in an environment, while interior holes represent obstacles on said surfaces. The picture above provides an examples of Polylidar3D extracting polygons from a 2D point set and a 3D triangular mesh; green is the concave hull and orange are interior holes. Polylidar3D outputs planar triangular segments and their polygonal representations. Polylidar3D is extremely fast, taking as little as a few milliseconds and makes use of CPU multi-threading and GPU acceleration when available.
Here is a small introductory blog-post about Polylidar3D.
Documentation and Branches¶
Please see documentation for installation, api, and examples. Note that Polylidar went though major changes in July 2020 for 3D work, now called Polylidar3D. The old repository for 2D work (and some basic 3D) is found in the branch polylidar2D and is connected to this paper. Polylidar3D can still handle 2D point sets but the API is different and not the focus of this repo. For papers referencing Polylidar2D and Polylidar3D please see Citations.
Eventually I am going to make a standalone cpp/header file for 2D point set -> polygon extraction for those that don’t need any of the features of Polylidar3D.
Polylidar Use Cases¶
Polylidar-RealSense - Live ground floor detection with Intel RealSense camera using Polylidar
Polylidar-KITTI - Street surface and obstacle detection from autonomous driving platform
PolylidarWeb. An very old Typescript (javascript) version with live demos of Polylidar2D
Concave-Evaluation - Evaluates and benchmarks several competing concavehull algorithms
Credits¶
This software is only possible because of the great work from the following open source packages:
Delaunator - Original triangulation library
DelaunatorCPP - Delaunator ported to C++ (used)
parallel-hashmap - Fast hashmap library (used)
marl - A parallel thread/fiber task scheduler (used)
PyBind11 - Python C++ Binding (used)
Robust Geometric Predicates - Original Robust Geometric predicates
Updated Predicates -Updated geometric predicate library (used)
Contributing¶
Any help or suggestions would be appreciated!
Citation¶
2D¶
If are using Polylidar for 2D work please cite:
J. Castagno and E. Atkins, “Polylidar - Polygons From Triangular Meshes,” in IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4634-4641, July 2020, doi: 10.1109/LRA.2020.3002212. Link to Paper
@ARTICLE{9117017,
author={J. {Castagno} and E. {Atkins}},
journal={IEEE Robotics and Automation Letters},
title={Polylidar - Polygons From Triangular Meshes},
year={2020},
volume={5},
number={3},
pages={4634-4641}
}
3D¶
If you are using Polylidar3D for 3D work please cite:
J. Castagno and E. Atkins, “Polylidar3D - Fast Polygon Extraction from 3D Data,” in MDPI Sensors, vol. 20, no.17, 4819, September 2020, doi: 10.3390/s20174819 Link to Paper
@Article{s20174819,
author = {Castagno, Jeremy and Atkins, Ella},
title = {Polylidar3D-Fast Polygon Extraction from 3D Data},
journal = {Sensors},
volume = {20},
year = {2020},
number = {17},
article-number = {4819},
url = {https://www.mdpi.com/1424-8220/20/17/4819},
issn = {1424-8220}
}
License¶
MIT
GitHub @jeremybyu